Google DeepMind revoluciona la robótica con nuevos sistemas de entrenamiento
Los modelos están diseñados para evaluar continuamente sus acciones y tomar decisiones éticas basadas en el contexto y el entorno
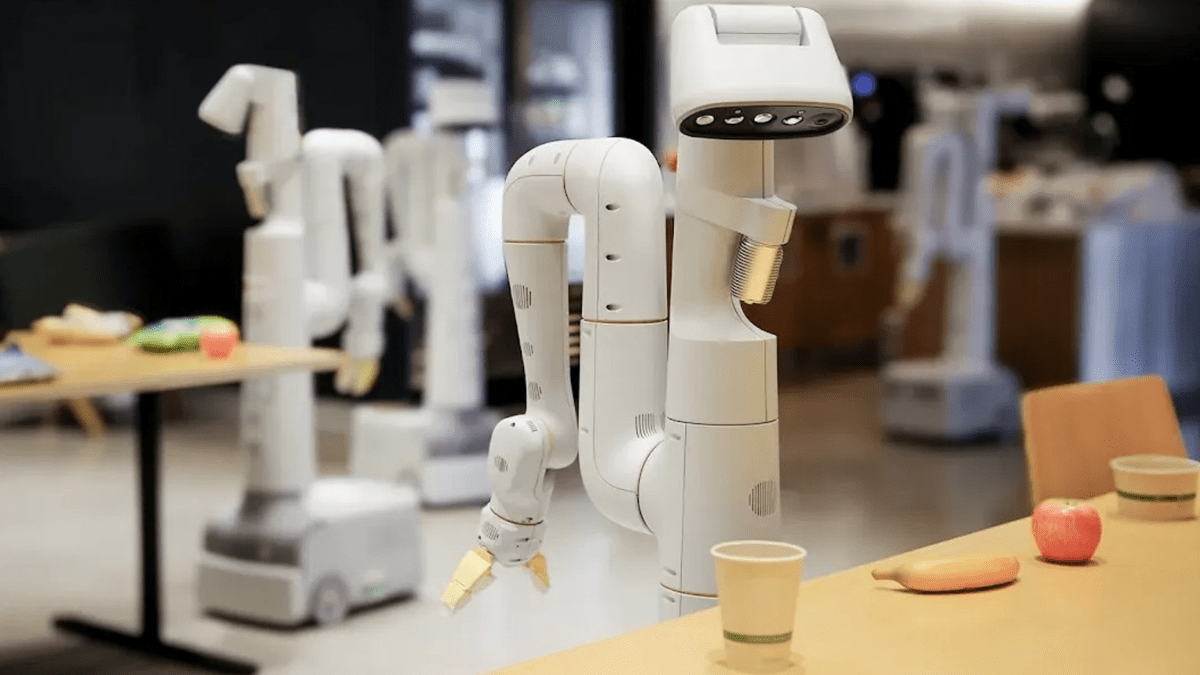
Los investigadores de Google DeepMind han revelado sus últimos avances en robótica, presentando tres nuevos sistemas diseñados para mejorar la comprensión y ejecución de tareas por parte de los robots, enfocándose en la seguridad y tomando inspiración de las leyes de la robótica de Isaac Asimov.
Basando su trabajo en una constitución robótica específica, inspirada en parte en las «Tres leyes de la robótica» establecidas por Isaac Asimov en su relato Círculo vicioso, Google DeepMind ha detallado en una nueva publicación en su blog oficial un conjunto de instrucciones de seguridad para guiar las acciones de los robots. Estas directrices incluyen restricciones como evitar tareas que involucren personas, animales, objetos punzantes o aparatos eléctricos, con el objetivo primordial de que un robot «no haga daño a un ser humano».
Avances clave para la seguridad y eficiencia robótica
Sin embargo, reconociendo que estas directrices por sí solas no garantizan la seguridad total, los investigadores de Google DeepMind han desarrollado tres sistemas adicionales que mejoran la capacidad de los robots para tomar decisiones rápidas, comprender y navegar de manera más efectiva en sus entornos.
Uno de estos sistemas es AutoRT, que emplea modelos fundamentales de lenguaje, visión y control para recopilar datos de entrenamiento en entornos reales. Este enfoque ha permitido realizar 77,000 pruebas robóticas en 6,650 tareas únicas, orquestando de manera segura múltiples robots de forma simultánea.
Otro sistema, llamado Atención Robótica Autoadaptable para Transformadores Robóticos (SARA-RT), utiliza una arquitectura de red neuronal para optimizar la fase de control en sistemas transformadores robóticos. Esto permite que los robots ejecuten tareas de manera más eficiente y precisa, reduciendo los requisitos computacionales.
Por último, el modelo RT-Trajectory busca mejorar el desempeño de los robots en la ejecución de tareas a través de vídeos de entrenamiento, ayudándoles a interpretar movimientos específicos y planificar trayectorias en dos dimensiones para realizar las tareas de manera más efectiva.
Google DeepMind sostiene que la combinación de estos tres sistemas contribuirá a la creación de robots más capaces y funcionales, abordando los desafíos actuales en robótica y adaptándose a las tecnologías más avanzadas en este campo.
Relacionados

Lady Gaga se une a ‘El Diablo Viste a la Moda 2’
La trama girará en torno al reencuentro entre Miranda y Andy en un mundo dominado por las redes sociales y la digitalización de la moda…

Hollywood despide a Diane Keaton, leyenda del cine
Hollywood llora su partida, pero celebra una vida dedicada por completo al arte y a la pasión por contar historias…
Jennifer López y el beso incómodo que revela las tensiones entre arte y poder
El beso, ese pequeño acto íntimo, se convierte otra vez en un símbolo de resistencia…

Paulina Rubio, envuelta en un nuevo conflicto legal por una mansión en Miami
El caso se habría agravado con la deuda reclamada por el arrendador, quien asegura que Rubio le debe una cantidad considerable por impagos y daños al inmueble.…